


Mission-Driven Undersea Systems
Multi-Role Capability
Multi-Mission Dependability
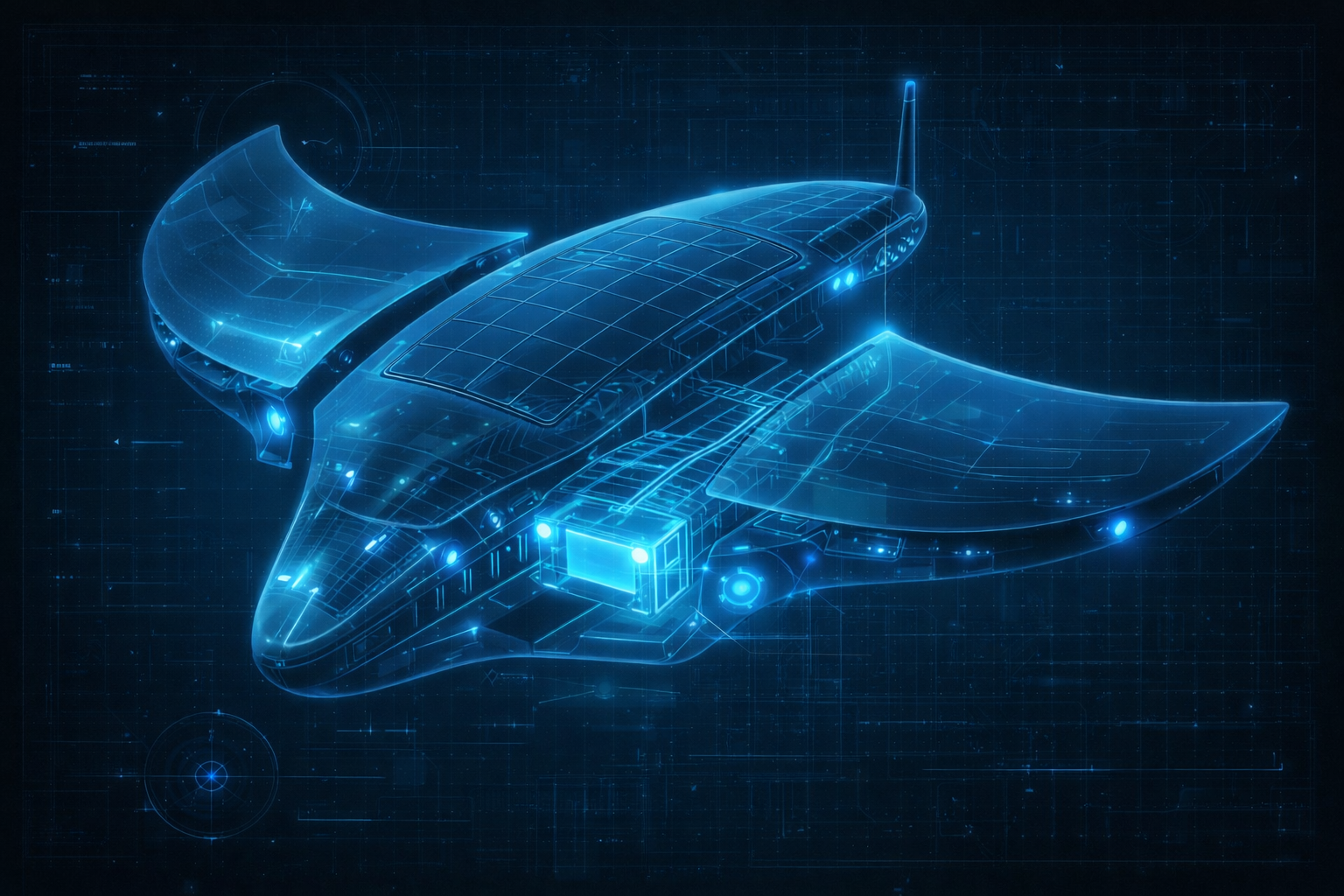
The MCUUV (Modular Combat Uncrewed Underwater Vehicle) delivers a step-change in multi-role maritime capability by combining mission-adaptive architecture with persistent, low-signature operations. Engineered for contested and DDIL environments, the platform integrates modular payload bays, autonomous navigation, and distributed sensing to execute ISR, seabed warfare, mine countermeasures, and communications relay within a single deployable system.
Its open-systems design enables rapid payload reconfiguration and software-defined mission updates, ensuring operational relevance across evolving threat landscapes without requiring platform redesign.
Built for multi-mission dependability, MCUUV emphasises redundancy, resilience, and recoverability at every layer—from power and propulsion to communications and control.
The vehicle maintains operational continuity through degraded network conditions via onboard autonomy and mesh-enabled data exchange, supporting resilient C2 and mission assurance. This ensures commanders retain decision advantage even in denied environments, while reducing risk to personnel and extending operational reach across littoral and deep-water theatres.
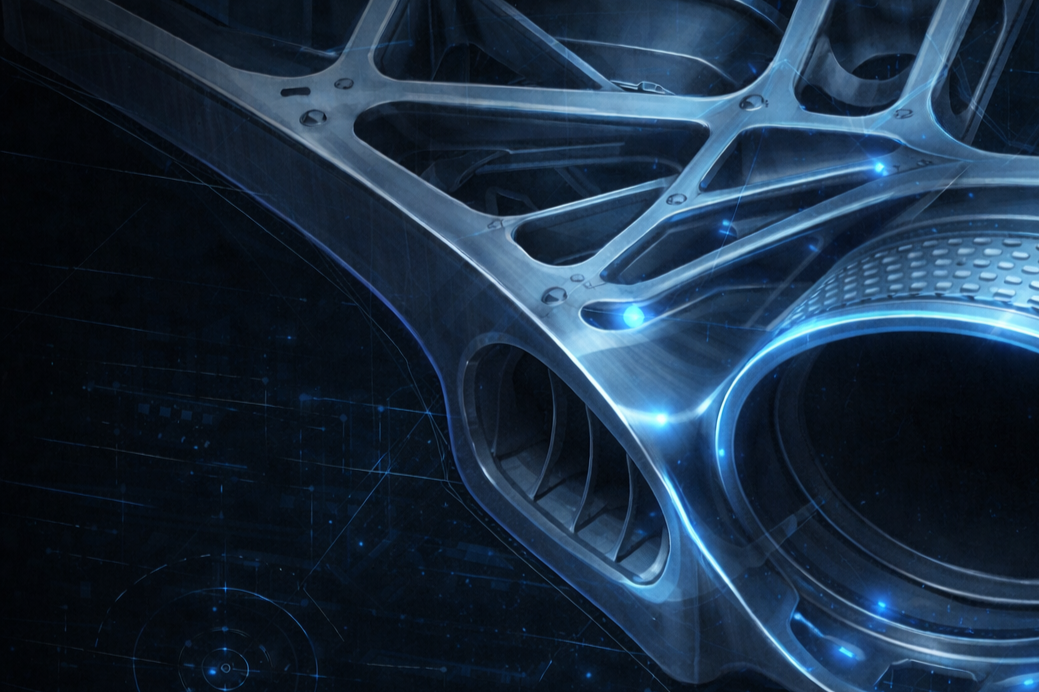
The hydrodynamic intake and ducted propulsion integration concept is central to the MCUUV’s efficiency, controllability, and mission endurance profile. The configuration is designed to manage waterflow through a refined intake path that supports stable propulsion performance while reducing turbulence, drag penalties, and unnecessary energy loss across variable operating conditions.
By treating the intake and propulsion system as a single integrated design problem rather than separate components, the platform advances a more efficient undersea architecture suited to sustained operations, low-signature movement, low cavitation and precise manoeuvres in confined maritime environments.

The MCUUV body concept is engineered as a concept-led undersea platform that integrates modular mission architecture with hydrodynamic efficiency to deliver a scalable and adaptable capability for contemporary and emerging maritime operations.
This is coupled with a structurally efficient internal skeletal architecture that supports rapid reconfiguration of mission-specific payloads, enabling a single platform to transition across surveillance, reconnaissance, naval support, and contested environment operations without fundamental redesign.
The MCUUV payload bay provision is engineered as a modular, mission-adaptable interface that enables rapid integration of specialist payloads.
Positioned within the platform’s structural envelope to preserve hydrodynamic performance and centre-of-mass stability, the payload bays are designed to support a broad spectrum of mission packages—including sensing arrays, communications relays, deployable effectors, and recovery systems—while maintaining the vehicle’s endurance and low-signature profile. This approach allows the platform to be reconfigured efficiently between missions, reducing turnaround time and increasing operational availability.